Download
Dataset files are available for download through ftp at:
ftp://ftp.amtc.cl/dataset/ijrr/
Individual text (.dat) files are compressed using gzip. Stereo images are also bundled into one gzip file per data sequence. The equivalent ROS bag files (created with ROS version Indigo) containing information from all sensors are also available for download.
The Traverse
Throughout the four-hour traverse, the robot was stopped at 44 locations to record high resolution 3D lidar point clouds. In straight tunnel sections, the distances between the stopped locations varied between approximately 30m and 40m to obtain sufficient overlap between consecutively obtained point clouds. These distances were increased when the robot was in a section that it has previously traversed. Radar measurements were also logged when the robot was stationary, but stereo camera images were not. Between the stationary scan poses, 43 traverses were conducted by manually controlling the robot. During each traverse, measurements from all sensors were logged. The lidar was configured to scan at a lower resolution to increase the scanning frequency (to every 6 s) while the robot was moving.
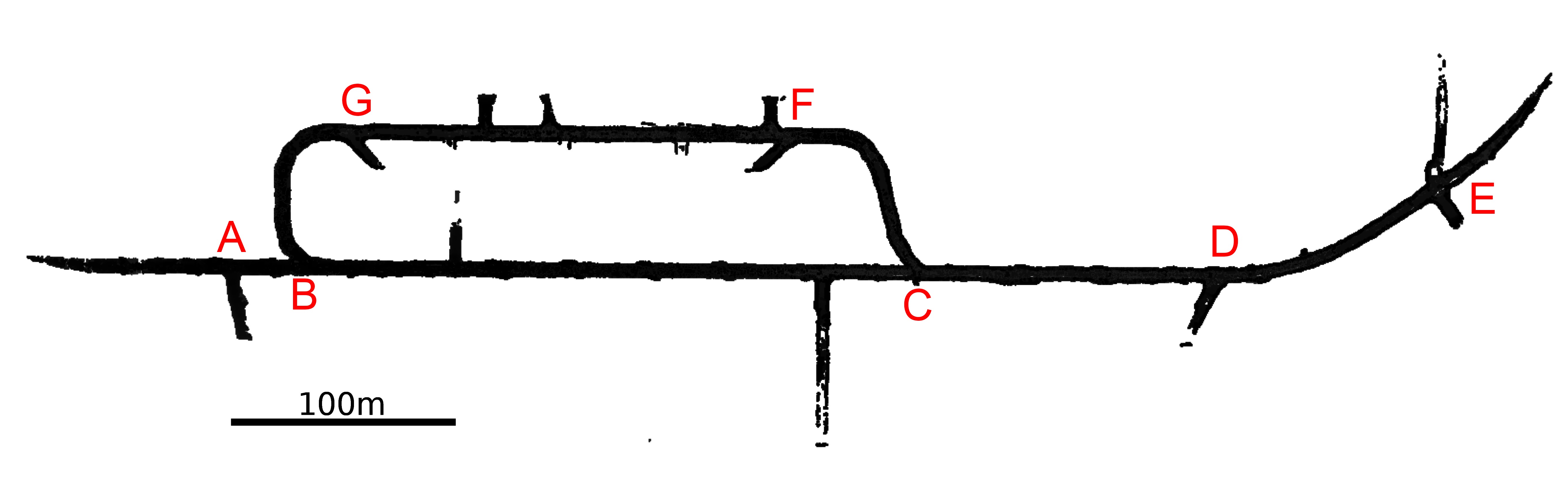
For organizational purposes, the dataset is divided into 87 parts (corresponding to the 44 stopped and 43 moving data collection sequences). These sequences are identified by a two digit number and a character (##{S,M}), where S denotes a stopped data collection sequence, and M denotes a moving data collection sequence. The sequence ids start with 00S, 01M, 01S ... until ... 43M, 43S. The following table are notes of the traverse using the data collection sequence ids and the labeled map below as reference.
| Data Sequences | Location | Notes |
|---|---|---|
| 00S [0.23 GB] | Location A | This is the start of the dataset, with the robot facing towards point B. Radar information is not available. |
| 01M [13.0 GB] 01S [1.60 GB] |
From A to B | Radar information is not availabe for 01M. |
| 02M [5.50 GB] 02S [0.70 GB] 03M [5.50 GB] 03S [0.68 GB] 04M [6.00 GB] 04S [0.68 GB] 05M [5.30 GB] 05S [0.67 GB] 06M [5.60 GB] 06S [0.68 GB] 07M [4.70 GB] 07S [0.68 GB] 08M [4.90 GB] 08S [0.68 GB] |
From B to C | |
| 09M [4.70 GB] 09S [0.68 GB] 10M [4.70 GB] 10S [0.67 GB] 11M [6.10 GB] 11S [0.67 GB] |
From C to D | The tunnel between 09S and 10S is dark, but lighting can be seen from the tunnel ahead. |
| 12M [3.80 GB] 12S [0.67 GB] 13M [4.50 GB] 13S [0.69 GB] 14M [3.30 GB] 14S [0.77 GB] |
From D to E | The tunnel between 11S and 14S is dark. and turns gradually. Lighting seen in the stereo camera images are from the safety headlamps of the operators. A large amount of standing and dripping water is present. |
| 15M [2.20 GB] 15S [0.22 GB] |
Location E | Ahead of the robot at 15S is a shaft for depositing material that will fall into lower levels of the mine. Radar data is not available. |
| 16M [3.00 GB] 16S [0.20 GB] 17M [3.20 GB] 17S [0.20 GB] 18M [4.00 GB] 18S [0.40 GB] 19M [5.50 GB] 19S [0.73 GB] |
From E to D | The tunnel is dark. Lighting seen in the stereo camera images are from the safety headlamps of the operators. A large amount of standing water and dripping water is present. Radar data is not available for 16S and 17S. |
| 20M [4.60 GB] 20S [0.66 GB] 21M [6.60 GB] 21S [0.66 GB] |
From D to C | The section traversed in 21M is initially dark. This is the same dark section between 09S and 10S but traversed in the reverse direction. |
| 22M [5.40 GB] 22S [0.65 GB] 23M [3.40 GB] 23S [0.72 GB] 24M [2.40 GB] 24S [0.67 GB] 25M [3.30 GB] 25S [0.69 GB] |
From C to F | This section is an uphill ascent. The tunnel section between 22S and 24S is dark. |
| 26M [1.80 GB] 26S [0.68 GB] 27M [4.80 GB] 27S [0.63 GB] 28M [6.40 GB] 28S [0.21 GB] 29M [4.40 GB] 29S [0.21 GB] 30M [6.20 GB] 30S [0.52 GB] |
From F to G | Radar data is not available from 28M to 30M. |
| 31M [3.70 GB] 31S [0.69 GB] 32M [3.20 GB] 32S [0.68 GB] 33M [6.40 GB] 33S [0.67 GB] |
From G to B | This section is a downhill descent. At the end of 33M, the robot makes a u-turn and climbs slightly uphill towards point G before stopping. |
| 34M [4.60 GB] 34S [0.67 GB] 35M [6.50 GB] |
From B to G | This section is an up-hill ascent. Traverse 35M passes through point G without stopping./td> |
| 35S [0.67 GB] 36M [6.20 GB] 36S [0.67 GB] 37M [6.50 GB] 37S [0.70 GB] |
From G to F | |
| 38M [4.90 GB] 38S [0.67 GB] 39M [3.80 GB] 39S [0.66 GB] 40M [4.10 GB] 40S [0.66 GB] |
From F to C | This section is a downhill descent. Traverse 38M is mostly a dark section of the tunnel that corresponds to the dark section experienced between 22S and 24S. At the end of traverse 40M, the robot turns at junction C to face the direction of junction B. |
| 41M [8.40 GB] 41S [0.67 GB] 42M [8.70 GB] 42S [0.73 GB] 43M [8.90 GB] 43S [1.30 GB] |
From C to B | The dataset ends with the robot at point B. |
Scan Pose Estimates
Reflective markers were placed at tunnel junctions, but it was infeasible to cover all the traversed tunnels with markers. The groundtruth poses of the robot at the 44 static scan positions were determined by using the high-resolution 3D point clouds from the Riegl lidar. Manual alignment was performed on consecutive 3D point clouds from the 44 static scanning positions. The batch optimization method by Borrman et al was then used to refine the alignment. Positional errors of (50 mm diameter) reflective markers observed from various poses were used to evaluate the quality of the solution. The average marker position error between scan pairs is 10.41 mm, with the standard deviation being 8.25 mm, and the maximum error being 32.34 mm. The top-view map shown above was constructed based upon all the point clouds plotted with the 44 ground-truth poses.